0.1电控导论
0.1.1电控组介绍
组如其名,我们的工作主要内容就是“电”和“控制”。“电”是指电控组队员要具有独立布置机器人上电线的布局,这需要我们拥有基本的焊接,连线的技能;“控制”是指队员具有独立编写代码用于驱动机器人上各种外设的能力。
(由于往年都会有同学区分不了电控组和视觉组,在这里注重标注一下两组的不同)
| 项目 | 电控 | 视觉(算法组) |
|---|---|---|
| 专业知识 | 嵌入式编程,机器人学,自动控制原理…… | 计算机视觉,深度学习,ROS…… |
| 编程语言 | C语言为主 | C++,Python为主 |
| 在开发流程中的位置 | 当机械组和硬件组完成工作后,接下来就是电控来进行机器人外设的驱动 | 当电控完成基本驱动后,有视觉部署自己的算法,是机器人更加智能(位于开发链的最后一层) |
以上内容只是为了帮助各位选取自己更感兴趣的组别加入,为了减少或者杜绝培训后才发现自己想加入的是另外一个组
0.1.2加入电控组你可以收获什么
- 焊接和布线
自己动手焊接线材,基础电路知识
- 代码编写能力
C/C++程序设计(基础)
单片机: GPIO输入输出、EXTI中断、TIM中断、PWM波形输出、UART通信协议、ADC等基础内容 ;FreeRTOS、CAN通信、USB虚拟串口
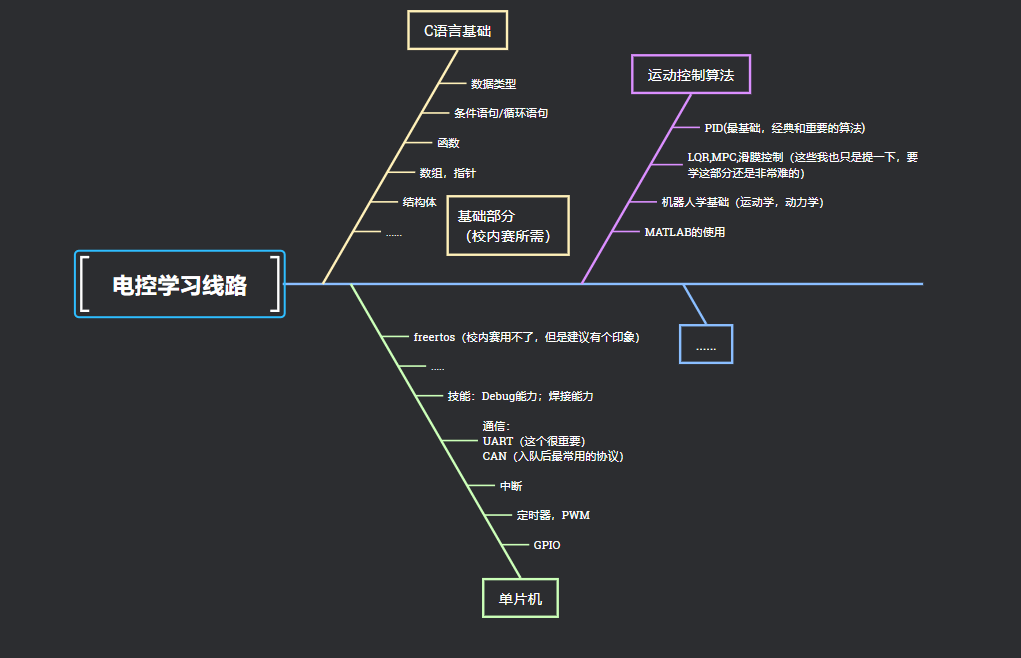
0.1.3学习路线(摘取自中科大开源电控培训(仅供参考和了解))
 (1).png)
 (1).png)
PS:这个是学习路线图,包括未入队阶段和入队阶段,在此列出只是给各位一个大概的学习思路,不至于特别迷茫(我们的培训只会包含一些基础的课程)
新手学习线路图
0.1.4电控精神
 (1).png)
这个是此文档最重要的内容!!!
0.1.5另外说明
由于本文档使用Gitbook编写,并且为了战队复用,会将此电子书发布到GitHub上托管。所以请各位同学提前学习有关Git的相关知识(我会在后续开一章详细介绍)。
同时为了同学方便查阅,此电子书会本地上传到QQ电控群群文件中。
由于笔者能力有限,有错误和不准确的地方请指出!!!
再次感谢中科大RoboWalker战队开源的电控教程!!!