4.1PID控制算法理论
1.什么是控制,为什么要控制
这里不做学术上的解释,控制可以简单被理解为让被控对象达成我们想要的动作。
大家校内赛去驱动电机,输入不同的占空比,就是为了让电机输出一定的转速,但是由于一些其他的原因(机械装配阻力,轮子在地面上打滑),导致我们可能输入的是一个期望值(ref),但其实电机转动的速度(measure)并不是我们期望的速度,这就导致了误差(error),上述的控制方式被称为开环控制1,而不同的控制算法就是为了尽量减少误差。
PS:为了给大家提供编程思路,上面这些期望值等我会用ref等英文代替。
这里仅介绍最基础的控制算法PID,还有其他的控制算法例如LQR,MPC,还需大家自己探索
2.理解PID
PID三个字母已经把这个算法的核心全盘托出,P->比例kp,I->积分ki,D->微分项kd,这三个参数会对误差做不同的处理,然后输出各自的out以弥补测量值和期望值之间的误差。
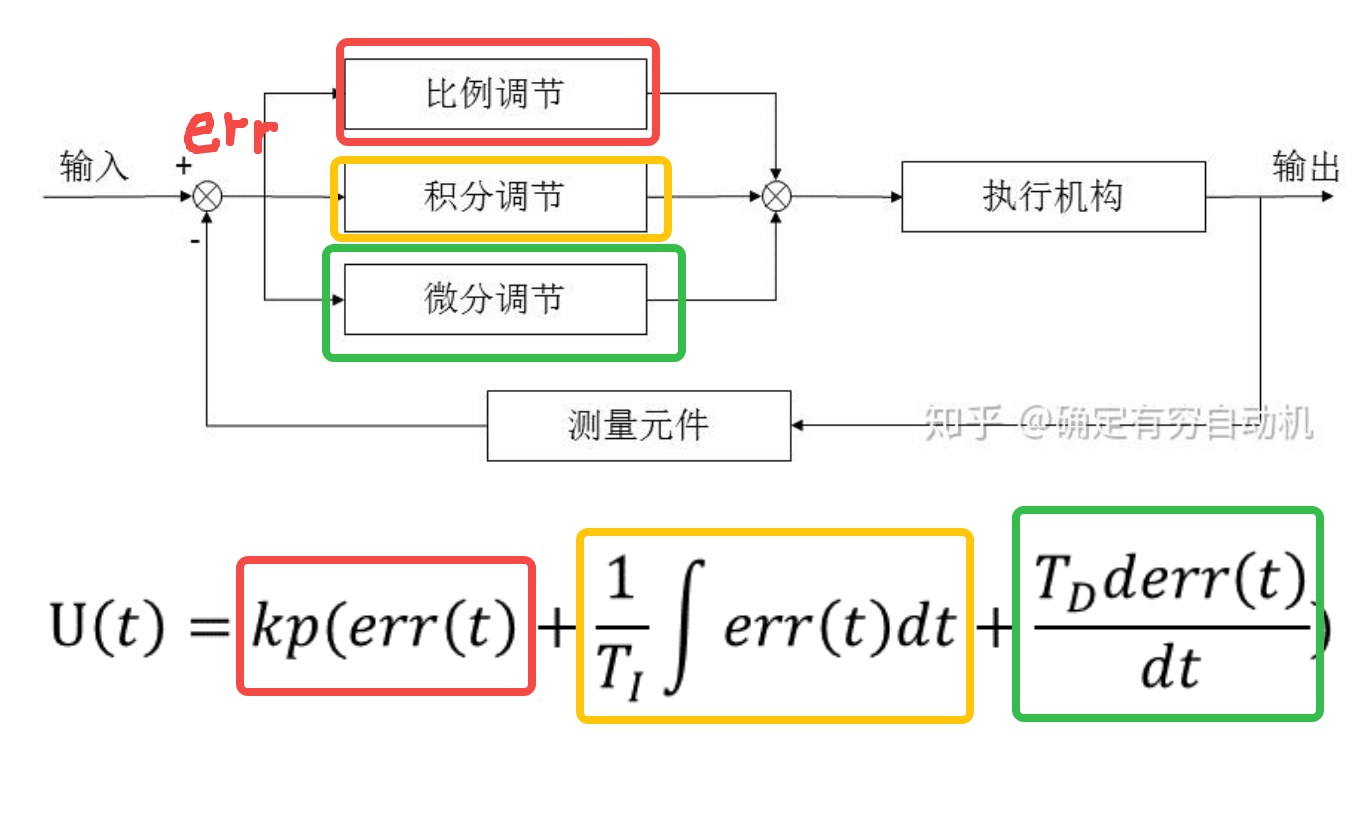
整个流程如上整个系统框图所示,输入就是ref,你可以看到有个加号,说明他是正值输入系统,还可以看到测量元件的输出measure是负值,于是我们得到error=(ref-measure)。然后得到error后,你可以看到其作为下一级的输入,输入到三个调节器中做不同处理,你大可以理解这三个调节器是并联的,并且你可以通过编程选择开启其中的某条通路,最后三个调节器的输出相加作为执行机构的输入。(公式与调节器相对应)
比例调节器Kp
比例调节器的输出是Kperror,假设你输入的电机ref为1000,但是测量器件得到的measure为800,那么此调节器的输出就是200 kp,这个特性也注定,这个参数是三个调节器最重要的部分,他是补充误差的大哥,一般来说补充误差最多的就是比例调节器。
积分调节器Ki
但是从上述控制是不足够,你是不是以为将kp设为1,然后输出正好是误差的值,这样整个系统就变成非常完美了。但是从工程上来讲,影响因素太多,这种理想状态不太可能存在,并且在大多数的工况下,我们不可能只是用单环PID,可能是多个PID级联(PID环的输入和输出物理意义不同),典型例子如(外环角度环,内环速度环),多环PID都是后话。所以就算我们将比例调节器的输出结果输入到电机中,我们还是无法保证其的测量值measure就是1000,比例调节器只是减少了误差。
综上,我们引入了积分调节器Ki,用于进一步减小误差,他的输出值是对误差的积分,假如第一个单片机运行周期内其误差是200,第二个是100,那么其输出就是ki * (200+100)这样,这样这个pid公式就进化为
$$ u=kp*error+ ki∗∫ error
$$ 于加入了积分项的存在,会让输入增大,从而使得速度慢慢接近ref,这就是积分项的作用。
微分调节器
误差的微分就是误差的变化速率,误差变化越快,其微分绝对值越大。误差增大时,其微分为正;误差减小时,其微分为负。控制器输出量的微分部分与误差的微分成正比,反映了被控量变化的趋势。微分作用可以缩短过渡过程和减小动差。但因为它不能消除偏差,所以微分作用不能单独使用,而是同比例积分等组成联合动作的调节器。加入微分调节器是为减小超调现象
总结

3.PID算法的实现思路
硬件需求
==带有编码器的电机(与不同电机来讲,其可以提供测量值)==
软件思路
先弄清我们需要哪些变量,根据原理,我们需要很多数据,不如我们使用结构体去构造一个PID的实例。那么我们需要指导结构体里面要有哪些变量。
typedef struct
{
float ref; //目标值
float err; //偏差值
float err_last; //上一个偏差值
float Kp,Ki,Kd; //比例、积分、微分系数
float integral; //积分值
float output_val; //输出值
} PIDInstance;
有了这个就可对各个pid实例进行操作了,即实现PID算法
float PID_realize(float actual_val)
{
/*计算目标值与实际值的误差*/
pid.err = pid.target_val - actual_val;
/*积分项*/
pid.integral += pid.err;
/*PID算法实现*/
pid.output_val = pid.Kp * pid.err +
pid.Ki * pid.integral +
pid.Kd * (pid.err - pid.err_last);
/*误差传递*/
pid.err_last = pid.err;
/*返回当前实际值*/
return pid.output_val;
}
4.调整pid参数
对于电控来说,这个会是最痛苦的环节,在这里没有太多经验介绍,因为该怎么调上网一搜都有,但是只有自己亲手调过,才能真的有所收获
但是肯定的是,这个必须要有上位机图像化调参才是非常科学的,实现思路可以通过串口转发数据到电脑上位机,或者是使用stm32cubemonitor实时监控
参考资料
【1】(99+ 封私信 / 74 条消息) PID控制算法原理(抛弃公式,从本质上真正理解PID控制) - 知乎
【2】(99+ 封私信 / 76 条消息) 详解PID调节的基本概念、参数与调试方法,清晰易懂! - 知乎
【3】电机控制进阶——PID速度控制_电机 pid 算法-CSDN博客
【4】使用stm32实现电机的PID控制_stm32pid控制电机-CSDN博客
1. 开环控制是一种无反馈的控制方式,其特点是控制信号单向作用于被控对象,无法根据输出结果进行调整。 ↩